UE实现圆锥体ConeTrace
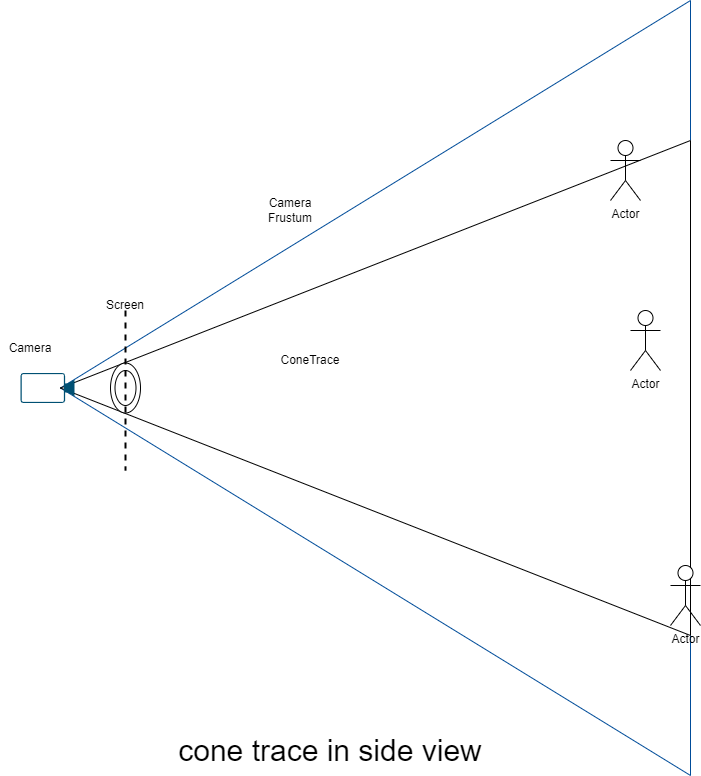
有时候实现Gameplay逻辑的时候,会要求判断屏幕的圆是否与场景的碰撞体相交(如瞄准辅助)。屏幕的圆与场景碰撞相交本质是视锥体与场景物体是否相交。此时ConeTrace能解决此问题,然而UE并不支持,Physx貌似也没有此类基本几何体。本文意在实现快速的ConeTrace。
构造凸包碰撞体方案
动态生成凸包是最万金油的做法,基本上大部分三维形状的Sweep都能做到。不过由于圆锥有弧度,生成的凸包会有一定的顶点数,最终也没有SphereTrace(内部实现是CapsuleTrace)的性能好。不过好处是能实现各种通用形状的Trace,如扇形体,平截头体等。由于暂时多考虑性能而不是通用性,暂不采用此方案。
基本几何体的组合方案
使用SphereTrace或者BoxTrace通过迭代多次,组合成近似的圆锥体是一种简单有效的实现方案。基本几何的Trace性能可控,做法调试也比较简单。
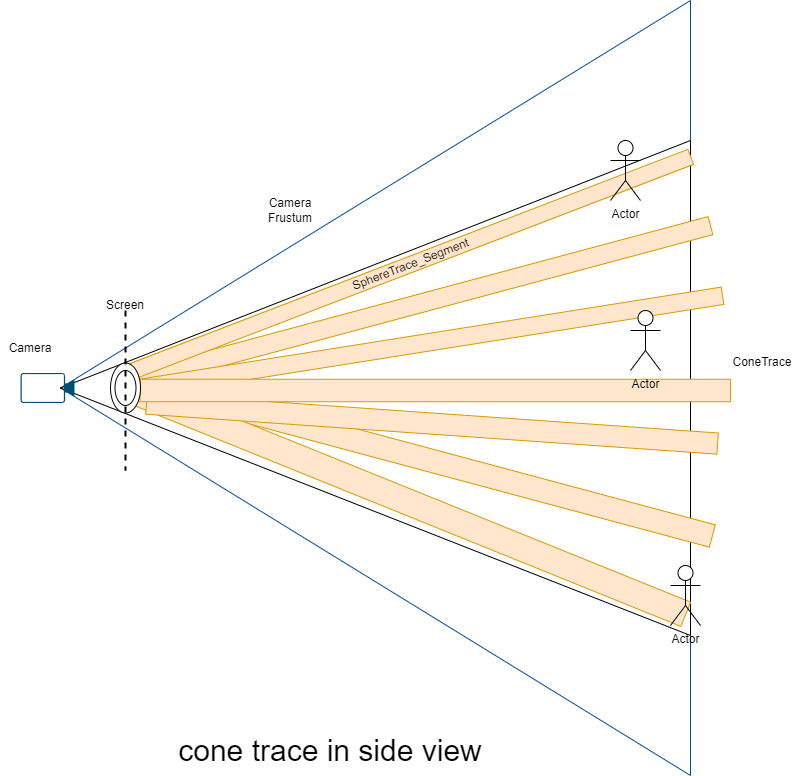
而组合Trace的方法又有两个:网格划分和切面划分。
网格划分指的是将屏幕圆划分成数个圆或者矩形,以圆或矩形发射SphereTrace或者BoxTrace。BoxTrace比SphereTrace的空隙更少,Trace长度长的比短的空隙更少,Trace分割(迭代)次数多的空隙比分割次数少的空隙更少。
切面划分的方法指的是把圆锥垂直切分成数分,用SphereTrace捕获对应的Actor。此方案不会有空隙的情况,但是需要排除几何体以外的碰撞。考虑到点在圆锥内的判断算法消耗不高,用此方案更为合适。
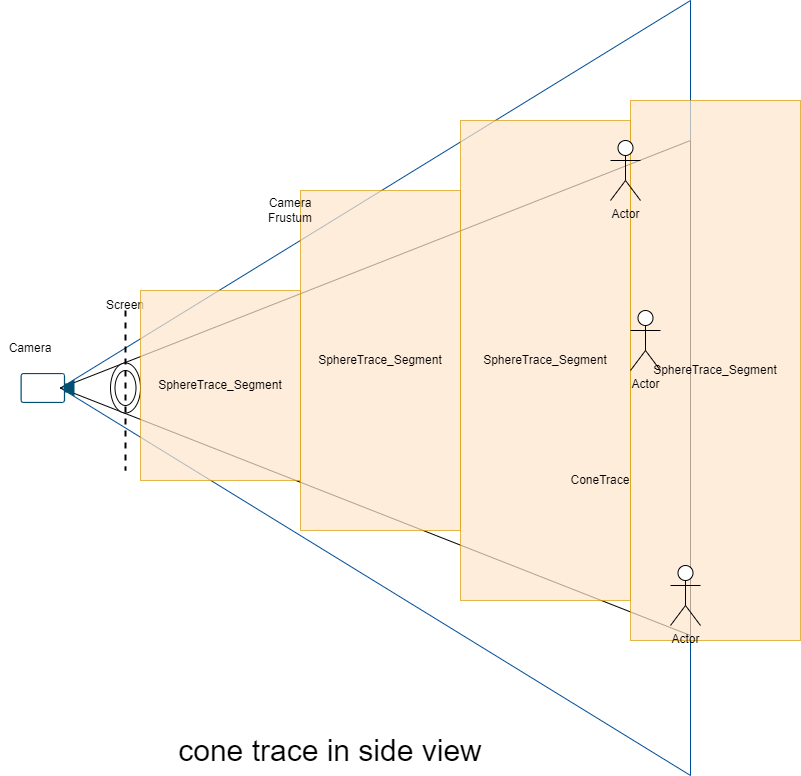
切面划分
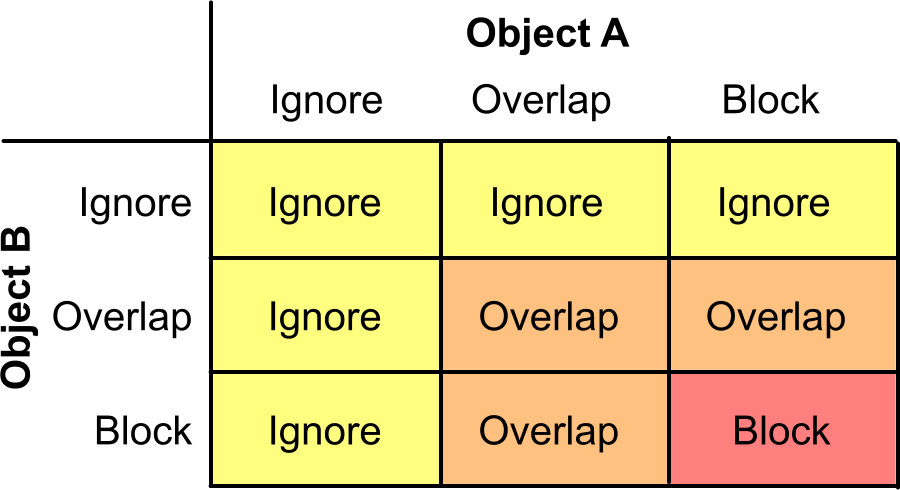
对于敌人高密度分布均匀的场景,切面划分次数越多,性能相对来说会越好。否则,一般三五个划分足矣。这个取决于游戏类型。另外对于UE物理引擎,默认Trace会遇到Block会立刻停止,如果此碰撞位置位于圆锥外面,需要忽略掉此物理体重新发出Trace,这样会增加物理消耗。此处可以利用碰撞通道反馈的特点,把Trace的FCollisionResponseParams.CollisionResponse降级为Overlap,此时Trace始终不会停止。具体可参考官方博客
经过切面划分的方式,结果可能有不在圆锥内的结果,因此还需要排除。排除方法也很简单,判断Trace方向与结果方向的夹角,是否小于圆锥半角即可。可以概括为下面公式:
\[\arccos(\hat{V_t}\cdot\hat{V_d}) \leq \frac{\theta_c}{2}\]其中$\hat{V_t}$是圆锥顶点到搜索目标的单位向量,$\hat{V_d}$是Trace方向的单位向量,$\theta_c$为圆锥角大小。
实现代码如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
void ConeTraceSingle(const UObject* WorldContextObject, const FVector Start, const FVector End,
float ConeAngle, ETraceTypeQuery TraceChannel, bool bTraceComplex,
const TArray<AActor*>& ActorsToIgnore, EDrawDebugTrace::Type
DrawDebugType, FHitResult& OutHit, bool bIgnoreSelf,
int IterateNum, FLinearColor TraceColor, FLinearColor TraceHitColor, float DrawTime)
{
UWorld* World = GEngine->GetWorldFromContextObject(WorldContextObject, EGetWorldErrorMode::LogAndReturnNull);
FVector Direction = (End - Start).GetSafeNormal();
float Length = (End - Start).Size();
float StepLength = Length / IterateNum;
float ConeHalfAngle = ConeAngle / 2;
FHitResult FinalResult;
if (IterateNum <= 1)
{
UKismetSystemLibrary::SphereTraceSingle(WorldContextObject, Start, End, 0, TraceChannel, bTraceComplex,
ActorsToIgnore, DrawDebugType, OutHit, bIgnoreSelf, TraceColor, TraceHitColor, DrawTime);
}
else
{
for (int i = 0; i < IterateNum; i++)
{
float ConeBottomRadius = (i + 1) * StepLength * FMath::Tan(FMath::DegreesToRadians(ConeHalfAngle));
FVector StepStart = Start + Direction * i * StepLength;
FVector StepEnd = Start + Direction * (i + 1) * StepLength;
TArray<FHitResult> StepHit;
SphereTraceMultiWithoutBlock(WorldContextObject, StepStart, StepEnd, ConeBottomRadius, TraceChannel,
bTraceComplex, ActorsToIgnore, DrawDebugType, StepHit, bIgnoreSelf,
TraceColor,FLinearColor::Black, DrawTime);
if (StepHit.Num() > 0)
{
StepHit.Sort([StepStart](const FHitResult& A, const FHitResult& B)
{
return (A.ImpactPoint - StepStart).SizeSquared() < (B.ImpactPoint - StepStart).SizeSquared();
});
for (auto Hit : StepHit)
{
FVector ImpactVec = Hit.ImpactPoint - Start;
float HitAngle = AngleBetweenVectors(ImpactVec, Direction);
if (Hit.Actor != nullptr && HitAngle <= ConeHalfAngle)
{
FinalResult = Hit;
break;
}
}
}
if (FinalResult.Actor != nullptr)
break;
}
}
OutHit = FinalResult;
}
其中SphereTraceMultiWithoutBlock函数是把Block降级为Overlap的方法:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
void SphereTraceMultiWithoutBlock(const UObject* WorldContextObject, const FVector Start,
const FVector End, float Radius,
ETraceTypeQuery TraceChannel, bool bTraceComplex,
const TArray<AActor*>& ActorsToIgnore,
EDrawDebugTrace::Type DrawDebugType,
TArray<FHitResult>& OutHits, bool bIgnoreSelf, FLinearColor
TraceColor, FLinearColor TraceHitColor, float DrawTime)
{
SCOPE_CYCLE_COUNTER(STAT_SMGSphereTrace);
ECollisionChannel CollisionChannel = UEngineTypes::ConvertToCollisionChannel(TraceChannel);
static const FName SphereTraceMultiName(TEXT("SphereTraceMulti"));
FCollisionQueryParams Params = ConfigureCollisionParams(SphereTraceMultiName, bTraceComplex,
ActorsToIgnore, bIgnoreSelf, WorldContextObject);
FCollisionResponseParams ResponseParams;
ResponseParams.CollisionResponse.SetAllChannels(ECR_Overlap);
UWorld* World = GEngine->GetWorldFromContextObject(WorldContextObject, EGetWorldErrorMode::LogAndReturnNull);
bool const bHit = World ? World->SweepMultiByChannel(OutHits, Start, End, FQuat::Identity, CollisionChannel,
FCollisionShape::MakeSphere(Radius),
Params, ResponseParams) : false;
}